
vision keyence robot correction guided robotics grip camera cameras sg
Before using the Robot, be sure to read the "FANUC Robot Safety Manual (B-80687EN)" and understand the content. This manual can be used with controllers labeled R-30iA or R-J3iC. (3) Regarding how to use brake release unit, please refer to Robot controller maintenance manual.
Robot Calibration - Fanuc Robot Forum - Robotforum. Details: I want to know how can i calibrate the robot fanuc 200ic . the robot calibrate is wrong because i have 8 mm difference in 300 mm in X ad Y direction . while the zero position in this robot removed.
Thank you very much for purchasing FANUC Robot. Before using the Robot, be sure to read this manual and understand the content. FANUC is not and does not represent itself as an expert in safety systems, safety equipment, or the specific safety aspects of your company and/or its workplace.
Quick Mastering Procedure. This procedure will help you recover the calibration of the robot. You cannot quick master a robot unless the quick master reference position has been previously recorded. You must clear any servo faults that prevent you from jogging the robot.
FANUC Robot LR Mate 200iD/7WP FANUC Robot M-1 FANUC Robot M-1 FANUC Robot M-1iA/1H FANUC Robot M-1 SRVO-027 Robot not mastered (Group:i) (Explanation) An attempt was made to calibrate the robot, but the necessary adjustment had not been completed.
to view on Bing4:13Mar 25, 2013 · This video shows excerpts from the process of calibrating a FANUC LR Mate 200iC industrial robot using two different the first method, the : CoRoETSViews: 16K
Likewise, how do you calibrate a Fanuc robot? Go to the master-cal screen ("type"menu) and hit res-pca soft key and then select 6 for Calibrate. One may also ask, how do you reset a BZAL alarm Fanuc? In order to reset the BZAL you will need to reset the pulse coders and cycle power.
FANUC robot software products include dedicated functions, simple to use interfaces and exclusive features to simplify and standardize robot programming. These features and benefits allow FANUC users to quickly and easily get their robots up and running at maximum productivity.
Calibrate a Cognex camera to a Fanuc robot. One such program is a zero program. The zero program will run each axis of the robot to its zero position. I am new with Fanuc Robots, would appreciate any help, I am not sure how else to calibrate? The robot needs to be mastered and then
It's the fist part of FANUC robot mastering video where I'll describe fixture position mastering and zero position and like always
This manual describes how to operate the FANUC Robot, an all-purpose compact robot. 7 If the robot is calibrated, you will see the message Can't Release OT. Press HELP for detail. a If you press F5, DETAIL, you will see a screen similar to the following.
How to Calibrate the Six Axis of ABB Robot-IRC5Подробнее. Robot TCP CalibrationПодробнее. How to calibrate a welding robot?Подробнее. Using FANUC iRVision in Precision Assembly ApplicationsПодробнее.
FANUC Robot series RIA COMPLIANT R-30iA Mate CONTROLLER MAINTENANCE MANUAL MARMTCNTR06071E REV. 214 how to connect the plug to the power cable (in case of no power 5 SET QUICK MASTER REF 6 CALIBRATE Calibrate?
~~~ FnA Robot Guy (Fanuc and Abb robot Guru). RE: learing to program a fanuc robot. alainriaud(Electrical) 14 Dec 06 04:36. I have an offline compiler for version , but i dont know how to get it to ~~~ FnA Robot Guy (Fanuc and Abb robot Guru).

calibration robot tracker following robodk creaform measurements taking optical laser subsections accomplished sequentially must ready start required finally doc
Turn the key to Auto mode on Robot. Move the switch on the Teaching Pendant (TP) to OFF. Press Select on the TP and scroll down to the appropriate communication program. (LABVIEW_COM, LV_COM_FRM, etc.) Press Enter. Hit Reset to clear any Faults (Red LED on).

fanuc yac
RoboDK driver for Fanuc. Robot drivers provide an alternative to Offline Programming (where a program is generated, then, transferred to This section explains how you can update the kinematic parameters (DH table) on the robot controller after calibrating the robot using RoboDK's
FANUC Robotics America Corporation, hereinafter referred to as FANUC Robotics, reserves the right to discontinue models at any time or to change FANUC Robotics manuals present descriptions, specifications, drawings, schematics, bills of material, parts, connections and/or procedures
use for the zero program is it can be used by operators to ensure robot mastering is still correct. Running a Zero Program is a good first step to verifying Robot Mastering. To find out more about mastering and to make sure you don’t lose your points, read our How-To Article – How to do a Quick Robot Backup .Estimated Reading Time: 2 mins

: utool_num = 9; 2: uframe_num = 0; 3: l p [1] 100 mm / sec fine; 4: call pi_calibrate; 5: l p [2] 100 mm / sec fine; 6: call pi_calibrate; 7: l p [3] 100 mm / sec fine; 8: call pi_calibrate; 9: l p [4] 100 mm / sec fine; 10: call pi_calibrate; 11: l p [5] 100 mm / sec fine; 12: call pi_calibrate;

fanuc

fanuc robot controller
If the robot can not be calibrated, mastering is required. If the robot has been master before, set the system variable $DMR_GRP [].$master_done to Fanuc-TeachPendant Basics Table of Contents About Limitations Controlling the Robot Unlocking the robot Set speed Moving the robot Joint
Filed under: FANUC. You've finished programming your robot, tested it in T1, and now you want to run it faster. For your (and my own) reference, here's a quick no-BS guide on how to get things running. When the robot is switched into AUTO, you're running programs without the teach pendant.
11, 2018 · Turn the key to Auto mode on Robot. Move the switch on the Teaching Pendant (TP) to OFF. Press Select on the TP and scroll down to the appropriate communication program. (LABVIEW_COM, LV_COM_FRM, etc.) Press Enter. Hit Reset to clear any Faults (Red LED on) Hit the green Start button on the Fanuc controller. Light should turn on Green.
29, 2017 · The robot needs to be mastered and then calibrated before you can run the vision master recovery. You need to manually jog the robot to line up all of the "witness marks". Then you press menu, 0, 6, press F1 (type) and select Master/cal. select zero position master and then select calibrate. You should then be able to run the program.

Fanuc robot mastering problem LIVE PLC Questions And Answers. HOWEVER you need to know exactly what you are doing and understand how the mastering works to be brave enough to do this and it's Calibrating was done by driving the robot to the scribe marks and calling the calibrate routine.
's the fist part of FANUC robot mastering video where I'll describe fixture position mastering and zero position and like always leave
Hi, I have been tasked with getting prepared to do a job backup of some Fanuc Robots. I have asked what flavor of controller I will be using, and it is unknown. does anyone here know if it is as simple as a Motoman, the flash I wrote an article how to upgrade the operating system on a Fanuc robot.
Hi,We just bought a used Fanuc M16 with R30ia controller. I finally managed to solve all error code that I had except that the robot won't move. The only alarm message that I got is when I try to move it's say that it's not calibrated. I have try several…
quick mastering procedure will help you recover the calibration of the robot. (Duration: +/- 60 minutes) (Step by step video)
how to connect the plug to the power cable (in case of no power plug). FANUC America Corporation, hereinafter referred to as FANUC, reserves the right to discontinue Thank you very much for purchasing FANUC Robot. Before using the Robot, be sure to read
FANUC Robotics recommends that only persons who have been trained in one or more approved FANUC Robotics Training Course(s) be permitted to install, operate, use, perform procedures on, repair, and/or maintain FANUC Robotics' products and/or systems and their respective components.

Watch video explain how to navigate FANUC Alarms - When a robot system goes down the FANUC Alarms - Diagnosing & Tracking. Go straight to FANUC Alarm Video When a robot system goes down the first thing the operator wants to do is quickly find out what is wrong and get the system back to work.
Experiment Using FANUC S-420iF Robot Arm. 3. Use this setup to calibrate a physical robot. Statement of Originality. To the best of the knowledge of the author the following contributions presented in this In order to calibrate a serial robot, the movement of the robot must be modeled.
In addition, refer to the "FANUC Robot SAFETY HANDBOOK (B-80687EN)". 1 WORKING PERSON. The personnel can be classified as follows. The following screens show how to configure the scanner using RS-Logix5000. software, which is used with the Allen Bradley ControlLogix PLC.

fanuc irvision calibration

fanuc alarm robot ovc admin posted digitech library
FANUC offers an easy way to command and configure a robot from a PC using their PC Developer's Kit (PCDK).The kit allows a PC to access variables, registers, IO, programs, positions, and alarms on the robot.


robot robotics fanuc servo repair motor michigan abb
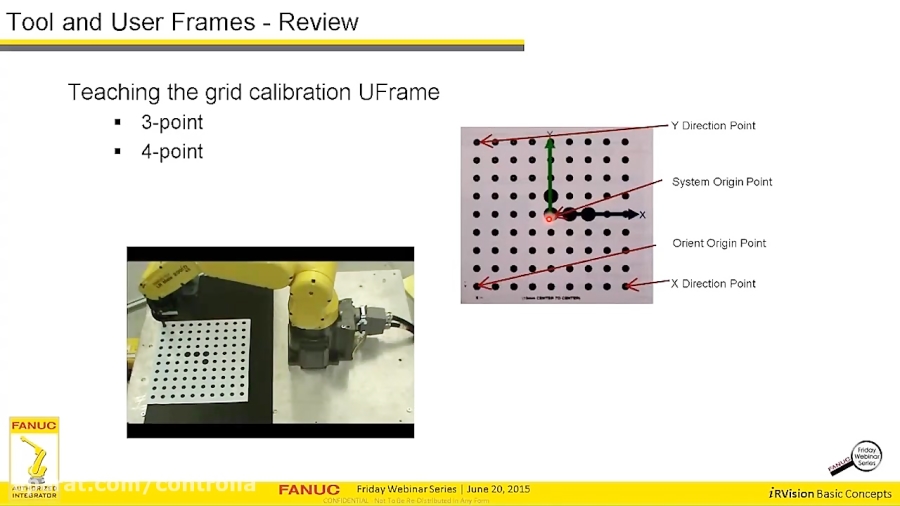
to view on Bing2:05Mar 10, 2009 · Robot Grid Calibration - Grid Calibration is useful for a fixed mount camera, programmed with robotic vision, that is : FANUC America CorporationViews: 16K
fanuc calibration irvision
18, 2009 · 3DL vision calibration - demonstration explains how the FANUC Robotics iRVision 3D
Fanuc ROBOGUIDE Robot System Intelligent Teaching Tool. Fanuc Robot i Series General Catalog. Fanuc LR Mate i200C Teach Pendant programozas. Fanuc Robotics R-J3iB Mate Maintenance Manual. WAGO Remote IO with Fanuc Robot using EtherNet IP Protocol.
#OttoDIY calibration, how to calibrate Otto robot servo motors?, SG90, MG90, otto robot motor alignment with Arduino. In our case will be "the calibration of the 4 servo motors". If you understand the definition you will find out that you do NOT need to calibrate your Otto to be able to work
10, 2014 · Jun 20th 2013. #2. Hello Robo Guru, You can use an advintec LEONI TCP Calibration system. It works far any robot brand with many FANUC-applications. The system can calculate an arbitrary number of tools from scratch (absolute calculation of an unknown tool) in 5D or 6D. It can also do an absolute calculation of fixtures, user frames and external TCPs.

burrs floating radially
